Diagnosis 21.09.2025 by Loïc
I went to DLL to see what was going on with Dingo. The main goal is still the legs here are the things I think we should do:
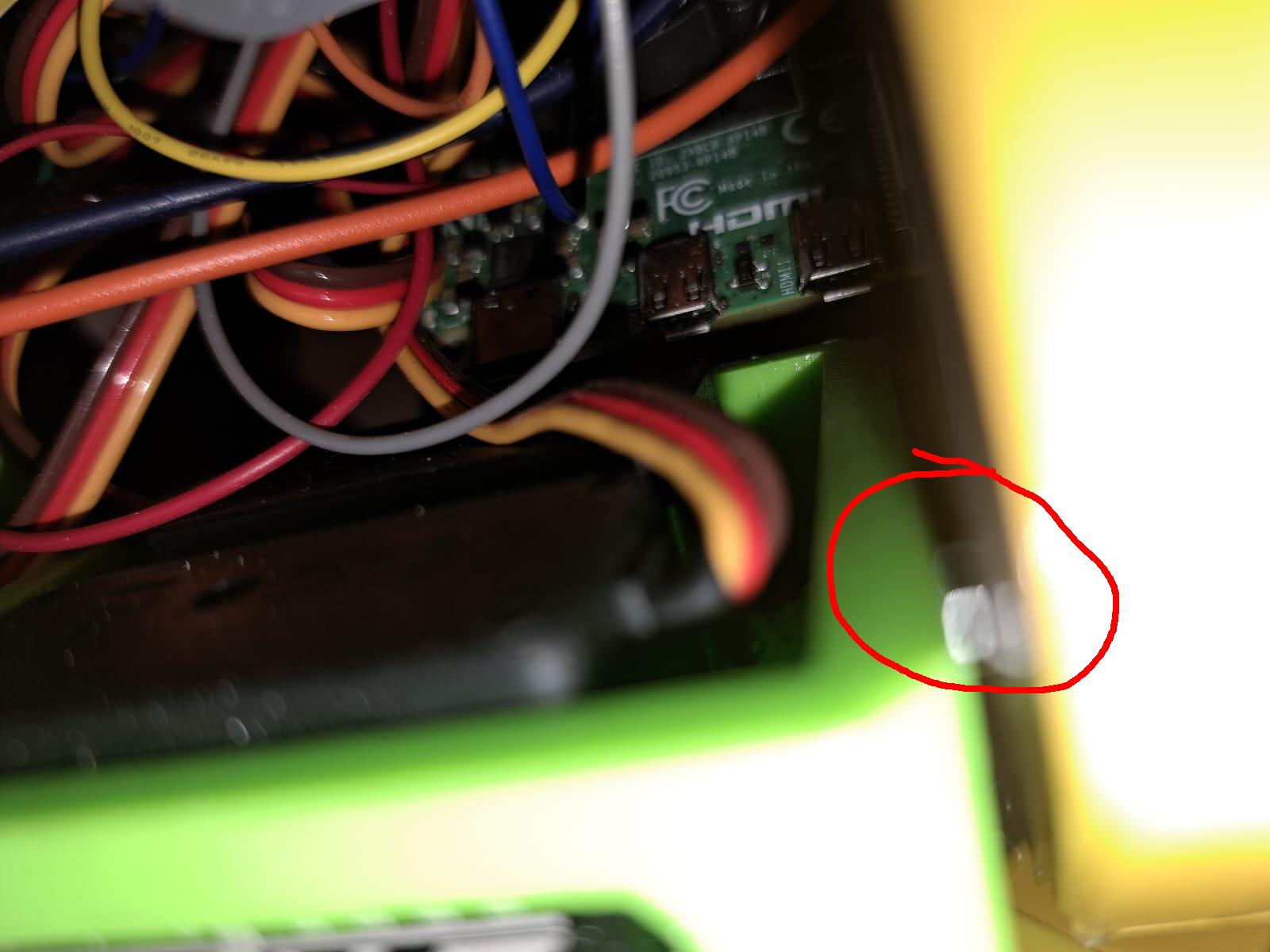
Find/Buy a new cable to program the arduino
Loosen the nut between the hip and the body to allow the leg to move better
Bad picture but location of the nut. It makes the hip hard to turn.
Order the Full Parts Kit for Pupper v3
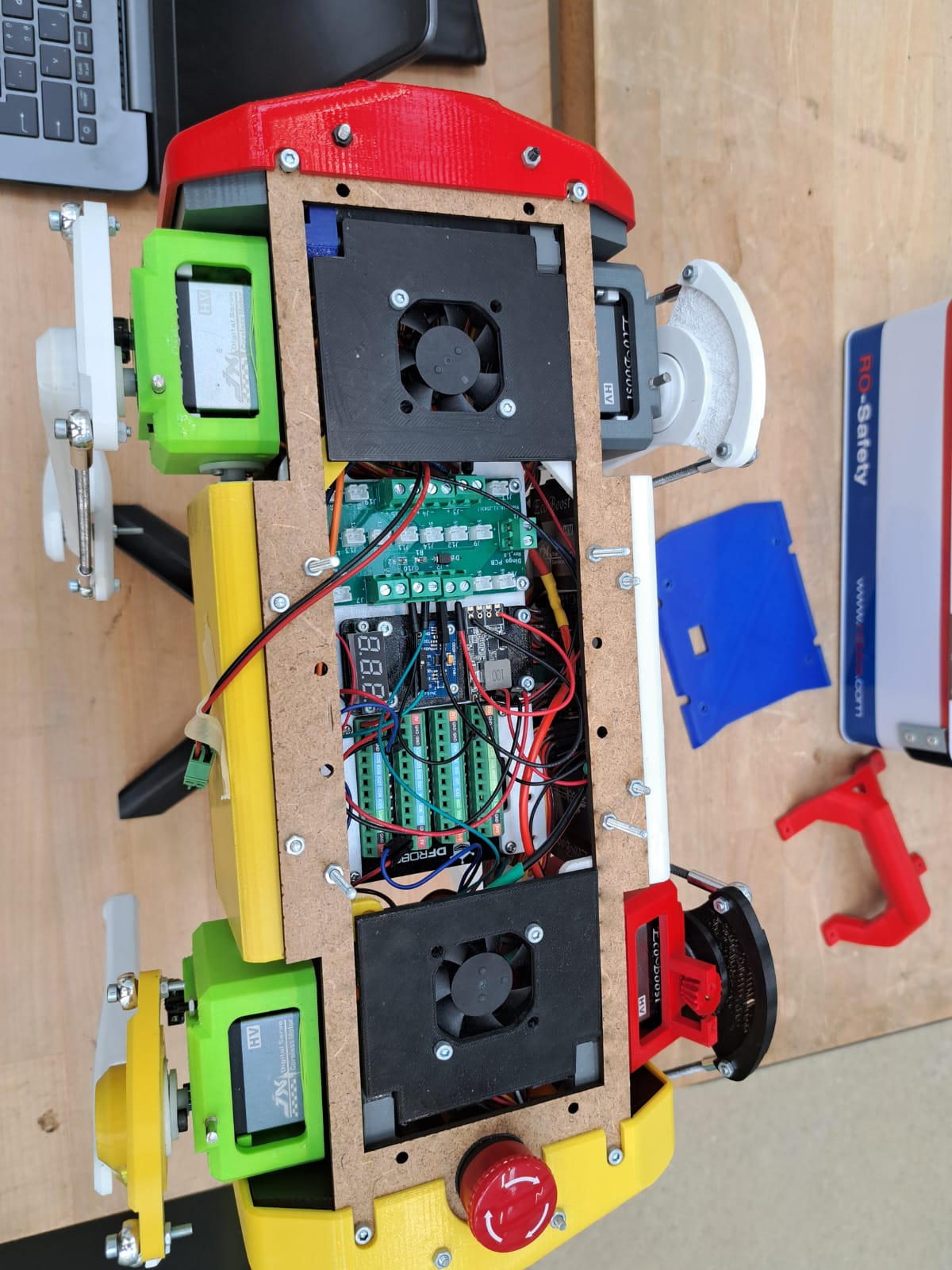
Add screw to screw the hip to the body servos
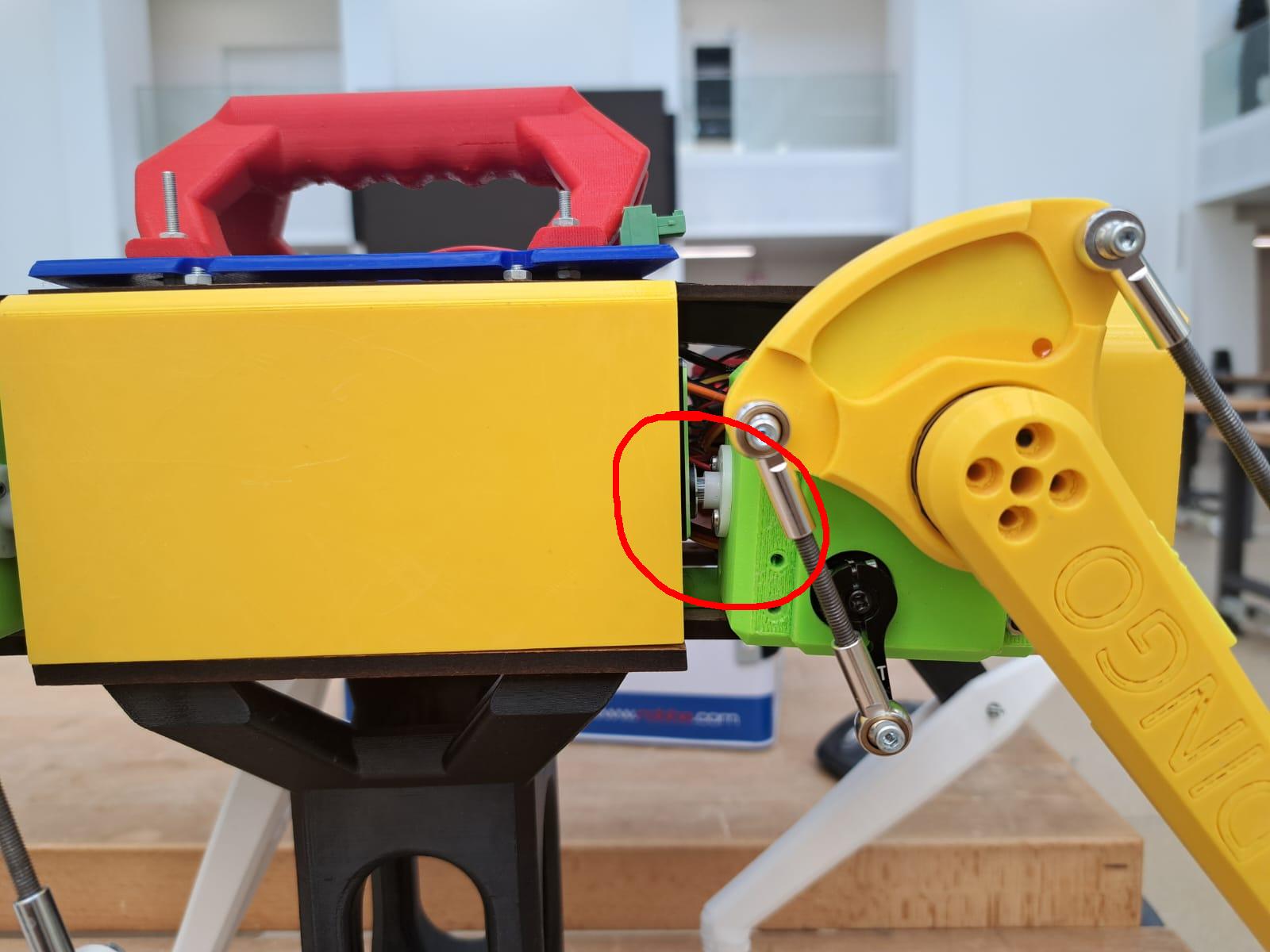
The hip bending down.
We can see in the picture above that the green hip is not straight with the body.
Cut out a small part in the wood to more easily reprogram the arduino
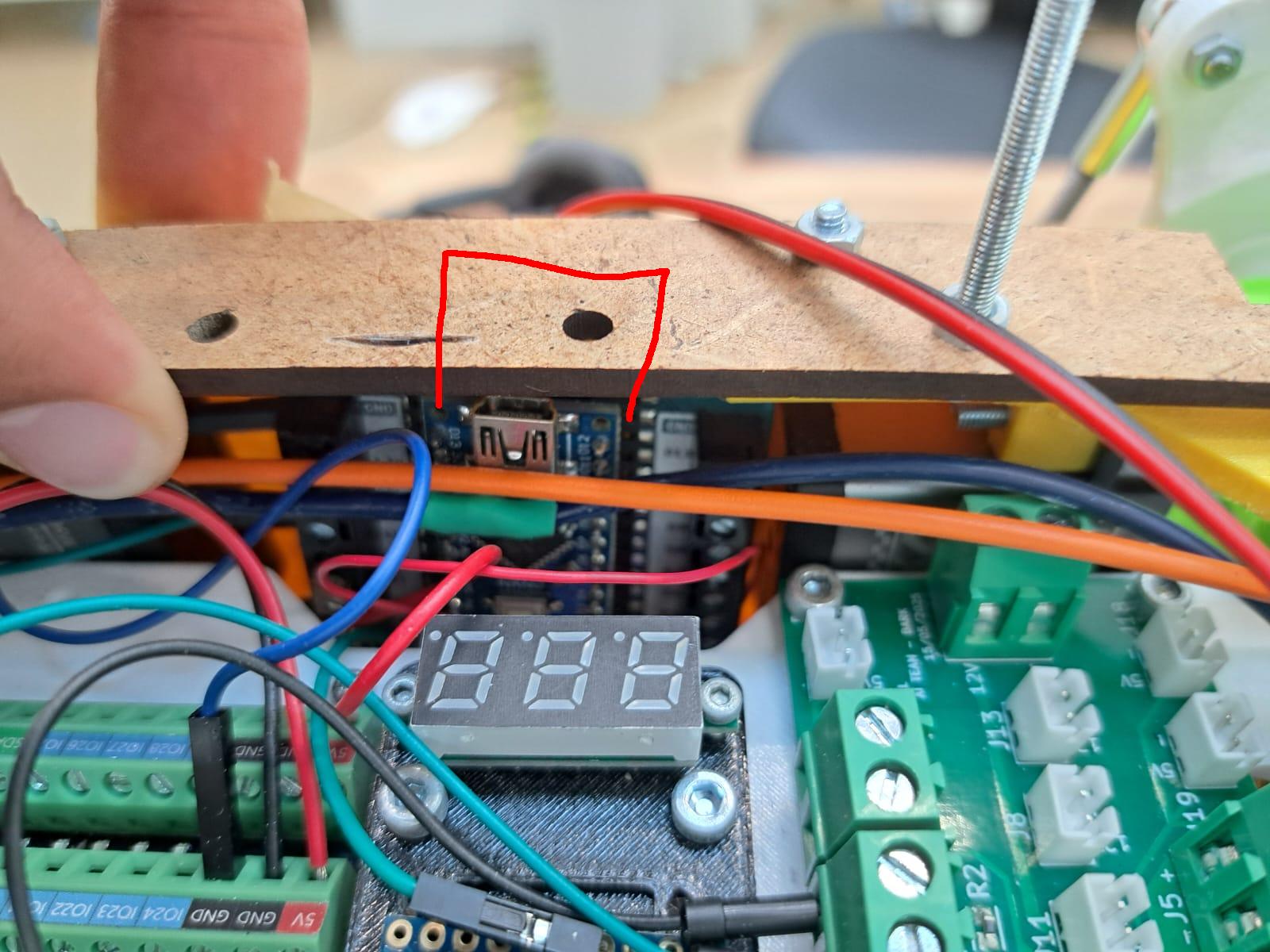
Where to cut
Fix the servo Horn Falling off on the grey hip
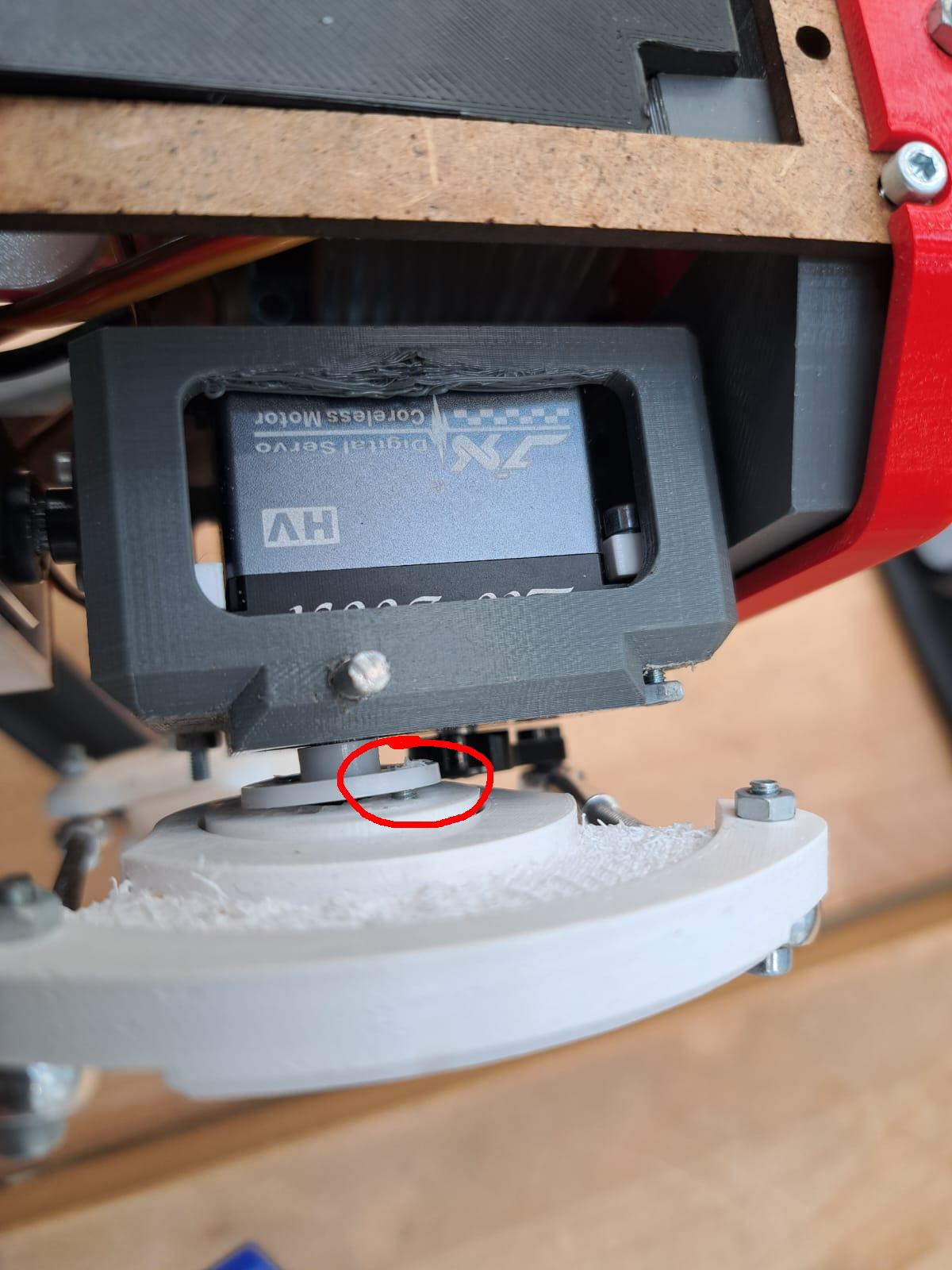
The loose screw on the horn
Add the “clapet” to make it easier to put in/ remove the battery
Organize all of our stuff (maybe with the laser wood boxes)
An example of a box with multiple compartments for organization from boxes.py
Add a see through plane at the top of the robot to be able to see the 7 segments display
Where the glass pane would go
Make a simple walk algorithm for the DINGO on the Arduino
Start flashing the PI and put ROS on it. Start understanding ROS and doing simulation.